
ロボットは長い間、SF 小説や映画の中で想像されてきましたが、現在のテクノロジーは、そのような機械がもはや空想の点ではないことを示しています。
現在、ロボットは、飛行車両からデータ計算、緊急対応、医療支援に至るまで、非常に細かいタスクを実行できるようになりました。
多様で、インテリジェントで、多機能なロボットの開発は日々大きな進歩を遂げており、多くの場合、女性がそのような仕事の最前線に立っています。
この記事では、ロボット工学の分野で「大活躍」している XNUMX 人の女性に焦点を当てます。
シーラ・ルッソ
ボストン大学機械工学助教授
ロボットは教室、工場、さらには手術室でも人間を助けています。 シーラ・ルッソのソフトロボティクスを使った最新作は、まさにその一例です。
ルッソ氏は、ハーバード大学ウィス生物インスピレーション工学研究所、ハーバード大学ジョン・A・ポールソン工学応用科学大学院(SEAS)、ボストン大学のチームと協力して、柔らかいミリメートルスケールの材料を製造する新しい方法を開発し、 柔軟なマイクロロボット 医療処置やその他のアクセスが困難な環境で使用されます。
ルッソは、Wyss Institute と SEAS の博士研究員としてプロジェクトの開始に貢献しました。
ソフトロボットは、内側と外側の両方が柔らかい素材でできており、従来の硬いロボットでは実現できなかった、変化する環境や構造化されていない環境でもより柔軟に作業できることが期待されます。
新しい技術を実証するために、ルッソ氏と彼女のチームは、複数の機能を備えたミリメートルスケールのロボットを設計する新しい製造プロセスを使用して、ロボットのソフト スパイダーを作成しました。
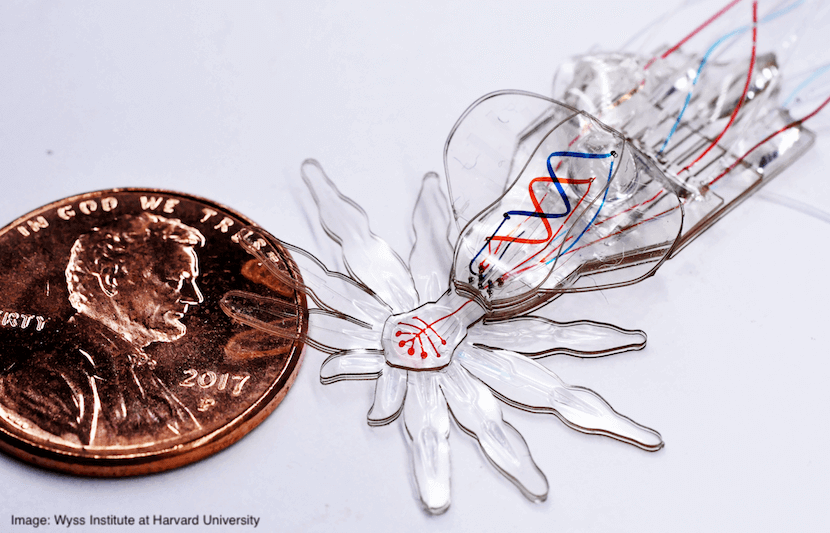
MORPH (Microfluidic Origami for Reconfigurable Pneumatic/Hydraulic) と呼ばれるこの製造プロセスは、ソフト リソグラフィー、レーザー微細加工、射出による自己折り畳みという XNUMX つの既存の製造技術を組み合わせたものです。
研究者らは、この新しいプロセスにより、ソフトロボットが、人体内の組織の安全かつ繊細な操作から、危険な場所での捜索や救助に至るまで、さまざまな用途で高度に構造化されていない複雑な環境を探索できるようになると考えている。
「最小のソフトロボットシステムは依然として非常に単純である傾向があり、通常は自由度がXNUMXつしかありません。つまり、形状や動きの特定のXNUMXつの変化しか作動させることができません」とルッソ氏は声明で述べた。
「18 つの異なる製造技術を融合した新しいハイブリッド技術を開発することで、XNUMX 自由度を備え、構造、動作、色の変化を含み、マイクロメートル範囲の微細な機能を備えた、シリコーンゴムのみで作られた柔らかいロボット スパイダーを作成しました。 」
[ディバイダ]
ダニエラ·ルーシ
MIT コンピュータ サイエンスおよび人工知能研究所 (CSAIL) 所長
MIT の電気工学およびコンピューター サイエンスの教授、CSAIL ディレクターとして、 ダニエラ·ルーシ ロボット工学、モバイル コンピューティング、データ サイエンスの分野で多数のプロジェクトに取り組んできました。
それらのプロジェクトの中で、Rus は次のことができるロボットを作成しました。 外骨格を変えることで見た目や能力を変える。 「Primer」として知られるこのロボット設計は、ロボットが XNUMX つのタスクを実行したり、XNUMX つの特定の目的に適合するように構築されるという従来の考え方から脱却したものです。
その代わりに、Primer には、特定のタスクに最適な形式を採用する機能があります。
柔軟性のなさがロボット工学分野の障害になると考えたラスと彼女のチームは、従来のような後退なしに多くの機能を実行できるロボットを開発したいと考えました。
「ロボット、特に映画で見るような剛体ロボットは、ほとんどの場合、各部品の構造が固定されており、単一の定義された目的を持っているため、一般にかなり柔軟性に欠けます」と氏は述べた。 宮下修平、元 CSAIL ポスドク研究員で、現在は英国のヨーク大学でインテリジェント ロボット工学の講師を務めています。
「これは、さまざまな種類のタスクを達成するためにそれらを簡単に開発できないことを意味します。」
外骨格がなければ、プライマーは金色の角砂糖のような外観をしています。 さまざまな外骨格を身に着けることで、歩き、転がり、航行し、滑空することができます。
その動きは磁石によって制御され、外骨格はプラスチックのシートの形をしており、加熱されるとプライマーの周りに折り畳まれます。 任務が完了すると、プライマーは水に浸して外骨格を脱ぎ捨てます。
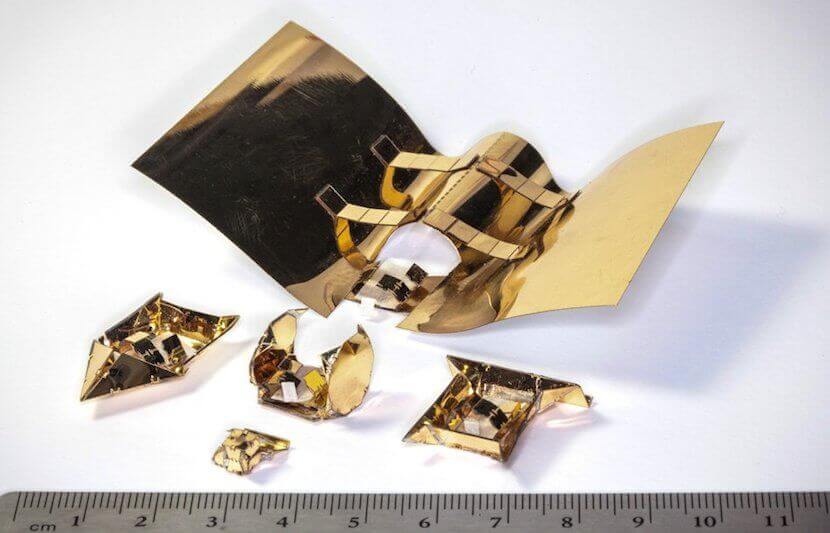
「折り紙に触発された製造は、汎用性、アクセス性、再利用性の高いロボット部品を提供することができます」とRus氏は述べています 声明で.
研究者らは、この研究が体内への薬物送達から将来の車両設計まで、さまざまな用途に使用できる可能性があると提案しています。
[ディバイダ]
モジデ・シャバジ
カルガリー大学地球工学教授
ロボット車両の自律飛行 GPS テクノロジーを使用しないでの移動が現実になりつつあります。 モジデ・シャバジ そして彼女の最近のドローン技術。
Shahbazi は、学術および職業上のキャリアを、微細スケール 3D マッピングおよびモデリング技術の進歩に費やしてきました。 彼女にとって、無人航空機 (UAV) は「マッピングとナビゲーションの目的を改善するためのプラットフォーム」として機能します。
しかし、最近まで、UAV は空中での誘導に GPS テクノロジーに依存していました。
これは、飛行機械が都市部に到達すると、高層ビルやその他の都市インフラによって GPS 信号が遮断されるため、問題になります。 田舎でも木々は同じことをします。
シャーバジ氏は過去の自律飛行のこうした欠点を認識していたが、このアイデアに可能性を見出していた。
「自律型 UAV やその他のタイプの無人システム (ロボット) は、安全に航行するため、また、私たちが与えた地図作成ミッションを遂行するために、周囲の環境と対話する方法を適切に教えれば、地理空間ツールとして幅広く応用できます。 」と彼女はTUNに語った。
「私が興味を持っているこれらのソリューションの地理学的応用には、インフラ検査、オンデマンド緊急地図作成、都市モデリング、野生動物管理、精密農業などが含まれます。」
より良いシステムに向けて取り組むために、彼女は「正確なナビゲーションのためのビジョンベースの技術の実装」、「自律的な画像取得のためのタスクベースのアクティブビュー計画」の作成、および「自動化された正確なナビゲーションのためのセマンティックステレオビジョン計算」の開発を計画しています。インフラの 3D マッピング。」
これは、彼女の新しい 3D テクノロジーが、建物、通信塔、送電線、道路などの都市インフラを「見て」その位置を測定できることを意味します。
「複数のカメラを使用することで、UAV は周囲の環境を 360 度見渡し、リアルタイムの 3D 再構成を実行できます」と彼女は言いました。
「この情報を使用して、現在の位置と次の動きの両方を決定します。これは、目的の目的地に安全に到達するだけでなく、与えられたタスクを達成することにも関係しているはずです。」
彼女はまだ現場で技術をテストしていませんが、ヨーク大学の拡張都市空間モデリング研究所と共同研究を行っています。 ソン・グンホ、ヨーク大学の地球工学准教授。
[ディバイダ]
アリソンオカムラ
スタンフォード大学機械工学教授
スタンフォード大学とカリフォルニア大学サンタバーバラ校の他の研究者とともに、 アリソンオカムラ できる「ソフト」ロボットを開発しました。 先端を伸ばして方向を変える 体を動かさずに。
このようなロボットは狭い空間や制限された空間でもうまく操縦できるため、捜索や救助活動で動脈の詰まりを解消したり、瓦礫をトンネルで通過したりするのに使用できる可能性がある。
インスピレーションは、つる植物、菌類、神経細胞など、先端から成長して距離をカバーする自然生物から生まれました。
「本質的に、私たちは機構から可動性や動きを引き出すこの新しいアプローチの基本を理解しようとしているのです」と岡村氏は語った。 声明で.
「これは、動物や人間が世界中を移動する方法とはまったく異なります。」
このロボットには小さな空気圧制御室と先端にカメラが装備されており、カメラは本体を通るケーブルによって所定の位置に保持され、環境の視覚的なフィードバックを提供します。 柔らかいロボットは、内部からの空気圧によって風船が膨らむように成長し、内部の物を運ぶことができます。
風船とは対照的に、ソフト ロボットの場合の違いは、圧力によって先端のみが広がることです。 ロボットの本体自体は拡張せず、先端の経路の形状をとるため、本体と環境の壁の間に滑り摩擦が発生しません。
この特性は、狭い空間を移動するロボットの能力の鍵となります。
研究チームは、血管内手術におけるソフトロボットの潜在的な応用を評価している。
動脈系に挿入されたカテーテルがより狭い血管を通過する必要がある場合に問題が生じる可能性がある従来の技術とは異なり、ソフトロボットは同じ制限に直面しません。 ロボットの先端は血管系の複雑な経路を通り抜け、血管壁を破ることなく狭い血管の中にもカテーテルを進めることができるだろう。
さらに、このソフトロボットは捜索救助活動にも役立ち、不安定になることなく瓦礫の間を縫うように進み、下に閉じ込められている人々に水を届けることができる。
また、柔らかいロボットは、ケーブルやワイヤー、ホースを狭くて手が届かない場所に導くために使用することができます。
[ディバイダ]
キャスリーンオドネル
ハーバード大学ウィス研究所スタッフ工業デザイナー
ウィス研究所のスタッフとして、 キャスリーンオドネル ロボット「エクソスーツ」技術を臨床に応用する取り組みを主導した。 脳卒中患者が普通に歩けるようになる.
この技術は、ハーバード大学ジョン A. ポールソン工学応用科学大学院 (SEAS) の研究チームが、ハーバード大学生物学的インスピレーション工学研究所ウィス研究所およびボストン大学健康・リハビリテーション科学部サージェントと協力して開発したものです。 College は、「片麻痺」の手足、つまり運動能力を失った手足に取り付けるロボット スーツです。
外骨格スーツは、肌にぴったりとフィットする衣服の形で片麻痺に陥った四肢に取り付けられ、機械動力を使用して四肢が正常に動くのに必要な追加の力を供給します。
外骨格スーツはヒップベルトに装着されたバッテリーから電力を供給され、手のひらや前腕の筋肉が腱を使って指を動かすのと同じように、電力は一連のケーブルを通じて患肢に伝達されます。

オドネルはプロトタイプに興味を持ち、協力しました。 ReWalk Roboticsは、歩行能力の低下に苦しむ人々を助けるために設計された機械装置を製造および販売する会社であり、プロトタイプに基づいた外骨格スーツの量産と広く商品化を目的とした提携を締結しました。
オドネル氏自身も、以前は Integra Neurosciences のフィールド サポート エンジニアとして働いており、手術室や ICU で直面する現実の課題の一部を直接観察していました。
「軟性外骨格スーツの開発を非常にユニークなものにしているのは、その作業が非常に学際的な性質を持っていることです。 チームとしてのさまざまな技術的専門知識に加えて、自主的な研究参加者との研究は、これらの外骨格スーツをどのように設計して構築する必要があるかを理解する上で中心となっています」と彼女は言いました。 声明で.
まとめ
今日のテクノロジーは信じられないほどの偉業を達成することができ、ロボットは科学のほぼすべての分野でタスクを実行できるように進歩しています。
これらの女性はそれぞれ、印象的な新しい機械の概念化、設計、開発促進に多大な貢献をしてきました。

