研究者たちは、柔らかいミリメートルスケールの材料を製造する新しい方法を開発しました。 柔軟なマイクロロボットへの道を開く 医療処置やその他のアクセスが困難な環境で使用されます。
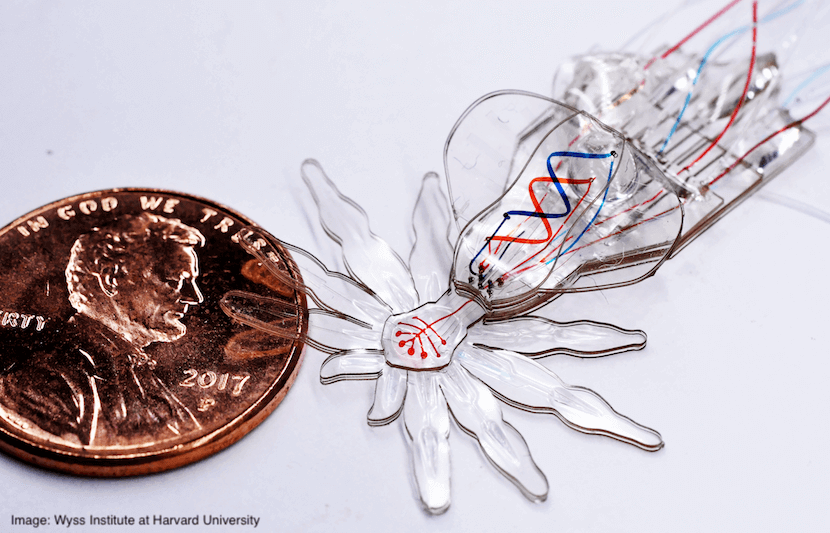
ハーバード大学ウィス生物インスピレーション工学研究所、ハーバード大学ジョン・A・ポールソン工学応用科学大学院(SEAS)、ボストン大学のメンバーで構成された研究チームは、その技術を実証するためにロボットのソフトスパイダーを作成した。
彼らの論文は、 ジャーナル 先端材料.
ブロック上の新しい子供
ハリウッドの SF 映画は、いつかロボットが私たちを支配するようになるという信じ込ませることに成功したのかもしれません。 しかし、少なくとも現時点では、ロボットは教室、工場、さらには手術室でも人間を助けています。
ごく最近では、内側と外側の両方が柔らかい素材でできているソフトロボティクスが、従来の硬いロボットでは達成できなかった方法で、変化する環境や構造化されていない環境に柔軟に対応できることを約束しています。
ソフト ロボットはその固有のコンプライアンスにより、外科医にとって非常に役立ちます。 センチメートルサイズのソフトロボットが開発されていますが、人体の繊細な組織を安全に移動するには、小型化するだけでなく、複数の機能を実行する必要があります。
「最小のソフトロボットシステムは依然として非常に単純である傾向があり、通常は自由度が XNUMX つしかありません。つまり、形状や動きの種類における特定の XNUMX つの変化しか作動させることができません。」 シーラ・ルッソ、博士研究員としてプロジェクトの開始に貢献しました。 ロバート・ウッドのグループ ウィス研究所とSEASで博士号を取得し、現在はボストン大学の助教授を務めていると声明で述べた。
木材 ハーバード大学ジョン・A・ポールソン工学応用科学大学院のチャールズ・リバー教授、SEASの工学応用科学教授であり、ウィス研究所の創立中核教員メンバーであり、ハーバード大学微生物研究所の創設者でもあります。
研究者らは、ミリメートルサイズのオーストラリアのクジャクグモからインスピレーションを得て、複数の機能を備えたミリメートルスケールのロボットを設計するための新しい製造プロセスを開発した。
「小さなクモ類にインスピレーションを得たソフトロボットを設計・製造するというアイデアは、それがソフトロボット工学における多くの未解決の課題を具体化しているという事実から来ています。」 トンマーゾ・ランザーニ、筆頭著者および責任著者。 彼はウッドのグループの博士研究員として研究を開始し、現在はボストン大学の助教授でもあります。
「確かに、それは幅がXNUMXセンチメートル未満で、マイクロメートルスケールに至る特徴、明確に定義された三次元構造、そして独立して制御可能な多数の自由度を備えています。 また、美しい色柄も特徴です。」
XNUMXつをXNUMXつに結合する
と呼ばれる新しい製造プロセス MORPH (Microfluidic Origami for Reconfigurable Pneumatic/Hydraulic) は、ソフト リソグラフィー、レーザー微細加工、射出による自己折り畳みという XNUMX つの既存の製造技術を組み合わせたものです。
まず、ロボットの外側の素材を作成するために、研究者らはソフト リソグラフィー技術を使用して 12 層のシリコンを作成しました。
「この最初のMORPHシステムは、単一のモノリシックプロセスで製造されており、数日で実行でき、設計最適化の取り組みで簡単に繰り返すことができます」とランザニ氏は声明で述べた。
次に、レーザー微細加工を使用して各シリコン層を正確に切断し、それぞれを下の層に接着して、クモの大まかな 3D 構造を作成しました。
そして研究者らは、注入による自己折り畳み法を使用して、 アクチュエータを備えた中空のマイクロ流体チャネルを各層に配置し、これらのチャネルに UV 硬化性樹脂を注入します。この樹脂は液体として注入され、UV 光にさらされると固化します。
樹脂がチャネル内で固化し、その後再び液体になると、ロボットは自らを折りたたんだり展開したりして、2D から 3D、またはその逆を行うことができます。
「この技術は、注入誘発自己折り畳みと呼ばれます」とルッソ氏 声明の中で述べている.
「切り紙や折り紙アートからインスピレーションを得ています。なぜなら、構造を切り取ってから、希望の形に折り、再構成できるからです。 折り紙作家のことを考えてみると、彼らは紙で白鳥を作ることができますが、その白鳥をもう一度広げたり、別の方法で折って別の動物を作ることもできます。」
腹部、頭、顎、脚のアクチュエーターにより、このロボットは独立して制御可能な XNUMX つの自由度と XNUMX つの構造的自由度を備えた多機能ロボットになります。
「18 つの異なる製造技術を融合した新しいハイブリッド技術を開発することで、XNUMX 自由度を備え、構造、動き、色の変化を含み、マイクロメートル範囲の微細な機能を備えた、シリコーンゴムのみで作られた柔らかいロボット スパイダーを作成しました。 」とルッソ氏は声明で述べた。
最後に、研究者らは孔雀蜘蛛の贅沢な色のパターンを模倣するために、溝を染めた水で満たしました。
クレジット: ハーバード大学ウィス研究所
ドアを開ける
ランザーニ氏は、この新しい製造プロセスにより、ソフトロボットは、人体内の組織の安全かつ繊細な操作から、危険な領域での捜索や救助に至るまで、さまざまな用途で非常に構造化されていない複雑な環境を探索できるようになると考えている。
「私たちは、この技術が高度な外科手術を実行できる新しいクラスの軟性外科用デバイスの開発に役立つことを願っています」と同氏は声明で述べた。

