義肢技術は近年大きく進歩しましたが、新しいデザインには数万ドルの費用がかかる場合があり、多くの切断患者は手頃な価格の製品を手に入れることができません。
現在、MIT のエンジニアは、 低コストの受動的義足 個人に合わせてカスタマイズし、健常者の歩行を模倣することができます。
"[歩くことは私たち人間にとって非常に核心的なものであり、下肢切断を患っているこの層の人々にとって、「足の剛性と形状を正確にどのように設計すべきか」と言える理論はありません。あなたが望むように歩むために』 アモス・ウィンターとマサチューセッツ工科大学機械工学准教授が声明で述べた。 「今ならそれができます。 そしてそれは超強力です。」
この研究は、 ASME 機械設計ジャーナル.
新しい挑戦
MIT の研究は、冬が近づいた 2012 年に始まりました。 ジャイプールフット、義肢を製造するインドに拠点を置く組織。
開発途上国の人々に受動的義足を提供しており、インド国内外の義足ユーザーに毎年 28,000 モデル以上を寄贈しています。
40 年以上にわたり、この組織は同じ足、つまりユーザーが屋外と屋内の両方でタスクを実行できる、頑丈で比較的実物に近いモデルを作り続けています。
ただし、モデルはかなりの重量があり、内部構造は手作業で作られているため、製品の品質にばらつきが生じます。
このため、ジャイプール フットはウィンターに、低コストで大量生産できる、より優れた、より軽量なフットの設計を手伝ってもらえないかと尋ねました。
「その時点で、私たちは『エンジニアとしてこの足をどのように設計すべきか』と自問し始めました。 足の剛性、機械的設計、形状を考慮した場合、パフォーマンスをどのように予測すればよいでしょうか? 私たちが歩いてほしい道を人に歩かせるには、これらすべてをどのように調整すればよいでしょうか?」 」とウィンター氏は声明で述べた。
足の発達
元MIT大学院生キャスリン率いる研究者ら Olesnavage は、まず義足の機械的特性をユーザーの歩行パフォーマンスに関連付けるための定量化可能な方法を探しました。
この関係は明白に見えるかもしれませんが、完全には形成されていませんでした。
これは、義足の開発者の多くが健常者の足や足首の動きを再現することに重点を置いているためであり、義足が何をしているのかを感じることさえできない人にとっては、これに大きな違いはありません。
「私たちが得た重要な洞察のXNUMXつは、ユーザーにとって足はある種のブラックボックスのようなものであり、足は神経系に接続されておらず、足と親密に相互作用していないということです」とウィンター氏は声明で述べた。 。
その代わりに、研究者らは、健常者の歩行者と同様の下肢の動きを生み出し、切断者の歩行能力を高める義足の設計に焦点を当てた。
「インドやその他の発展途上国の義足使用者は、障害に伴う偏見を避けるために、健常者に見えることを望むのが一般的です。 この要件により、私たちは健常者に近い脚の動きを容易にする足の設計方法を模索することになりました」とウィンター氏は述べています。
したがって、これを念頭に置いて、チームは、足が地面と接触しているときに下肢がどのように動くかに足のメカニズムがどのように関連しているかを理解する方法を探しました。
研究者らは、特定の体格と体重を持つ健常者の歩行者の歩数の測定値で構成される既存のデータセットを参照しました。 以前の研究者は、歩行者の足が各ステップで経験する地面反力と変化する圧力中心を、下肢の位置と軌道とともに記録していました。
次に研究者らは、単純な義足の剛性、考えられる動き、形状を記述する数学的モデルを開発しました。
次に、データ衛星から地面反力を入力しました。これを使用して、ユーザーの下肢が XNUMX 歩でどのように移動するかを予測できました。
彼らはモデルを使用して、「下肢軌道誤差」が最小限になるようにシミュレートされた義足の剛性と形状を調整し、健常者に近い下肢軌道を生成しました。
製品の微調整
次にチームは、健常者の歩行器と同様の脚の軌道を生成しながら、製造が簡単で手頃な単一部品の義足の理想的な形状を探しました。
これを行うために、研究者らは「遺伝的アルゴリズム」を実行して、最も望ましい設計を検索しました。
彼らは、さまざまな曲線形状を作成するためのさまざまな変数を使用して、足の「母集団」を作成しました。 次に、下肢の軌道誤差を計算し、誤差の大きいものを削除し、誤差の小さいものを組み合わせて理想的な形状に進化させました。
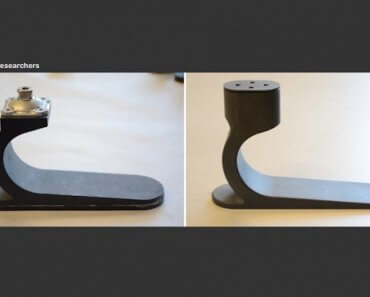
これを行うために、彼らは幅の広いベジェ曲線を使用して足の形状を記述し、最終的にはトボガンの側面図に似たものになりました。
研究者らは、ベジェ曲線の硬さと形状を人の体重と体格に合わせて調整することで、健常者の歩行と同様の脚の動きを生成する顧客専用の義足を製造できると考えている。
最後に、研究者らはインドのボランティアのためにいくつかのナイロン製の足を製造して設計をテストしました。
「私たちの研究チームは半年ごとにインドのパートナーを訪問し、プロトタイプをテストし、患者や医師からフィードバックを得ています。」 ウィンターは言った。 「私たちの足を試した患者たちは、通常の歩行速度を促進するそのエネルギー貯蔵と復帰能力に非常に興奮していました。 ある被験者はあまりにも興奮して外を走り回っていました。」

次のステップ
インドでの試験が成功した後、チームはゴム製のアウトソール、柔軟なハイキングブーツ、足のように見えるランニングシューズを製造するイタリアの会社Vibramと提携しました。
「この夏、私たちはビブラム社が設計した一体型のオーバーモールド化粧品と耐摩耗性ソールを使って、足を長期的にフィールドテストする予定です」とウィンター氏は語った。 「私たちはテクノロジーを商業化するための最良のビジネスモデルを模索しています。 商用化までそう遠くはなく、数年もかからないと思いますが、リリース前に製品が堅牢でユーザーのニーズを満たしていることを確認するためにデューデリジェンスを行うことが重要です。」
さらに、この研究には、負傷して現役復帰を希望する兵士や、アクティブなライフスタイルを送る退役軍人のための義足を作成するために米国国防総省から資金提供が行われている。
「私たちは、荒れた地形や坂道の上り下りなど、この層にとって重要となる複数の歩行シナリオに合わせて足を調整する方法を模索しています。 また、3D プリントなどを利用して、個人向けに簡単にカスタマイズできる足を作る方法も模索しています」とウィンター氏は述べています。
ウィンター氏はまた、女性の切断患者は自分にとって大きすぎる、または硬すぎる足を使用しなければならないことが多いため、個人の体格と体重を利用して個人に合わせてカスタマイズされた足をデザインする能力は女性にとって特に重要であると付け加えた。
全体として、チームは、切断者に低コストで健常な歩行パフォーマンスを提供できる義足を作成したいと考えています。
「私たちの目標は、裕福な市場で入手可能な製品と同等の歩行性能を提供しながら、価格は数分のXNUMXで、発展途上国の何千万人もの下肢切断者にとって手頃な価格の義足技術を開発することです」とウィンター氏は述べた。
「私たちは、丈夫で文化的に適切な製品と健常者の歩行動作に近い機能を提供することで、私たちの足がこの人々の移動、雇用、社会への完全な統合を促進できることを願っています。」

