からのエンジニアチーム ソウル大学 は、 ソフトなロボットのための皮膚様電子システム より柔軟に動くようになり、人間の周りでより安全になります。
ソフトロボティクス 人間の手のような生きている生物をコピーし、その周囲や仕事に移動して適応させることを目指すロボット工学のサブフィールドです。 柔らかいロボットは、剛性材料で作られた従来のロボットとは異なり、柔軟性と繊細性を高める柔軟な材料で作られています。
ソフトロボットは、高齢者を支援するなどの特別な手作業を必要とする領域だけでなく、人間の手が侵襲的手術のように生物学的に到達できない領域においても支援することができる。
依然として開発段階では、現在のところ、ほとんどのソフトロボットの設計にはソフトボディがありますが、リジッド基板などのハードドライブ部品があります。 それらの本質的にハードな駆動部分は、しばしばロボットの動きを妨害することがある。
しかし、現在、ソウル大学チームは、内部と外部の両方からソフトなロボットをその名前に忠実にする電子スキンを開発しています。
「このe-skinはソフトなロボット組み立ての新しい道を開きます」 洪Yongtaekソウル大学電子計算機工学科教授と主任研究者の一人が声明で述べた。 「ロボットが知覚できないほど柔らかく、薄く、軽くても、ロボットを「運転肌」として活性化することができます。 "
この論文は、 科学ロボット工学.
方法
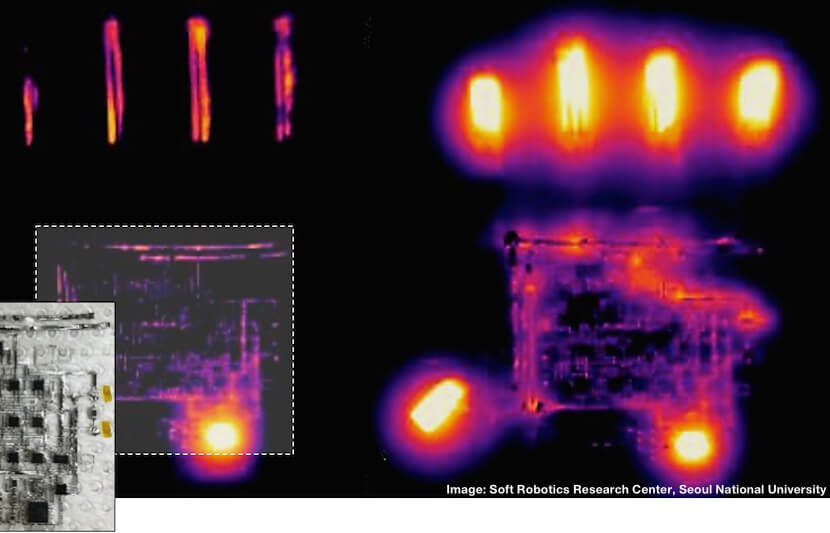
e-スキンは、ワイヤレスシステムを使用して通信します。 5メーター以上の距離で4ステートの制御信号を実行し、通信に耐性を持たせることができます。
また、空間的に断片化した回路構成を採用しているため、柔軟性があります。
下のビデオでは、e-スキンがマシンがさまざまな方法で伸びて狭いスペースを通過する方法を確認できます。
ビデオ:ソフトロボティクス研究センター、ソウル国立大学
プリントに優しい「伸縮性ハイブリッドエレクトロニクス」アプローチに基づいて、e-スキンは2つの部分で機能します。
1つの部分は人間側で入力感知で動作し、もう1つはソフトロボットを起動することで動作します。
e-スキンは薄く、1 mm未満で、0.8 g前後で重さがあり、1.5 mm×1.5 mm未満の標準寸法を持ち、人間の肌のように伸ばして適合させることができます。
「私たちのモチベーションは、人間の皮膚や多曲率/任意の曲面に適合する電子システムを開発することです。 「電子システムは、バイオ信号モニタ、繊維センサ、ディスプレイ、ソフトロボットコントローラなどとして機能するだろう」
次のステップ
香港によれば、研究者らは、e-スキンが機械的変形のもとで生き残り、柔らかいロボットフレームに取り付けられて、柔らかい動きを妨げずにアクチュエータを作動させることに成功したことを首尾よく試験した。
今や、柔らかいロボットは非常に限られた空間を通過して動作することができ、時にはロボット自体よりも小さい場合もあります。
無線通信により、研究者は、電子スキンを可逆的に組み立てることにより、複数のタイプのソフトロボットをワイヤレスで起動することができます。
研究者らは、ソフトロボットをより効率的に動かすために、アクチュエーターとセンサーを備えたフィードバックシステムを構築しようとしています。
「私たちは人体の動きを検出できるようにセンサとアクチュエータを組み合わせて、フィードバック信号が人体の動きを助けるソフトなロボットパーツの作動を引き起こすことができるようにしたいと考えています。

