ロボットチーターは、MIT が 21 世紀に開発した最も人気のある発明の XNUMX つです。 そのデザイン、スピード、サイズ、強さ、ジャンプ能力により、ファンのお気に入りとなり、現実世界でも応用されています。
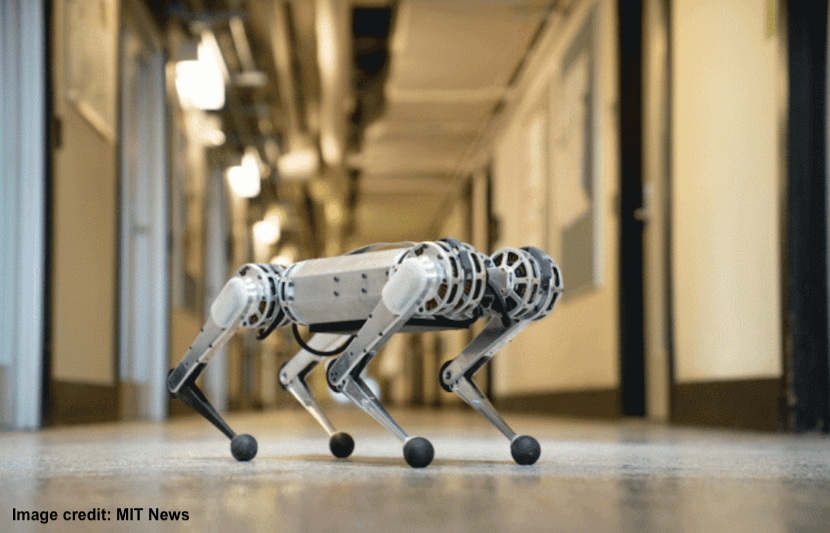
今、 第三世代ロボットチーター 3 と名付けられたこの車両は、視界がなくても、でこぼこした地形を素早く移動し、瓦礫に覆われた階段を登り、押したり引っ張ったりしても簡単にバランスを取り戻すことができます。
重さ90ポンドの「盲目」ロボットは、最終的には発電所の検査を行ったり、下水道を通り抜けたり、建物火災から人々を救い、高齢者の移動能力を向上させることができるようになるだろう。
機械仕掛けの猫は、カメラに頼るのではなく、「盲目的移動」を使って周囲を手探りで移動します。
「ブラインドロコモーション技術により、障害物を踏んだり、モデル化されていない物体と衝突したりするような予期せぬ状況に対して、ロボットの堅牢性が大幅に向上しました。」 キム・サンベ、MITの機械工学の准教授であり、ロボットの設計者でもあります。
「視覚はノイズが多く、わずかに不正確で、時には利用できないこともあります。視覚に頼りすぎると、ロボットの位置が非常に正確である必要があり、最終的には遅くなります」と同氏は声明で述べた。 「したがって、私たちはロボットが触覚情報にもっと依存できるようにしたいと考えています。 そうすれば、高速で移動しながら予期せぬ障害物に対処できるようになります。」
Cheetah 2 と比較して、この新しいロボットはソフトウェアが改良され、動作範囲が拡大されました。
前後に伸びたり、左右にひねったりすることができ、大きな猫のように機敏で運動能力があります。
高度なアルゴリズム
この時点まで、 MIT バイオミメティック ロボティクス ラボ 荒れた地形で効果的な機動性を備えたマシンを開発していませんでした。
接触検出アルゴリズムとモデル予測制御アルゴリズムという 3 つの新しいアルゴリズムにより、チーター XNUMX はバランスを素早く回復し、困難な地形をトレッキングし、階段を上り、動物とほぼ同じ効率で移動することができます。

接触検出アルゴリズムにより、ロボットは特定の脚の振りを止めて地面に置くべきタイミングを理解できるようになります。
このアルゴリズムにより、ロボットは障害物に遭遇したときに踏み続けるか足を引くかを認識するため、バランスを失うことがなくなります。
ロボットが脚をいつ切り替えるかを知るために、脚が地面に触れる確率、脚が地面に当たることで発生する力、そして脚がスイングの途中にあるかどうかという XNUMX つの確率を常に考慮します。
このアルゴリズムは、加速度計、ジャイロスコープ、地面に対する各脚の角度と高さからのデータに基づいて確率を計算します。
ロボットの体は予期せぬ障害物に反応することがあります。 何かを踏むと体と脚が調整されてバランスを保てます。
「人間が目を閉じて一歩を踏み出すと、地面がどこにあるのかについてのメンタルモデルがあり、それに備えることができます。 しかし、私たちは地面の感触にも依存しています」とキム氏は声明で述べた。 「私たちは、移行時間を決定するために複数の情報(ソース)を組み合わせて、同じことをしているようなものです。」
モデル予測制御アルゴリズムは、ロボットが最も効果的な方法で体を動かすことができるように、各ステップで各脚にどれだけの力を加える必要があるかを決定します。
具体的には、このアルゴリズムは XNUMX 秒先の未来を見据えてロボットの胴体と脚の適切な位置を計算します。
「誰かがロボットを横から蹴ったとします」とキム氏は声明で述べた。 「足がすでに地面に着いているとき、アルゴリズムは『足にかかる力をどのように指定すべきか』を決定します。 左側に望ましくない速度があるため、その速度を殺すために反対方向に力を加えたいと考えています。 この反対方向に 100 ニュートンを加えた場合、XNUMX 秒後には何が起こるでしょうか? 」
アルゴリズムはこれらの計算を 20 秒あたり XNUMX 回実行します。
それをテストするために、研究者らはロボットがトレッドミル上を歩きながら、押したり、引いたり、引っ張ったりした。
研究者らは 3 月にチーター XNUMX を発表する予定です。 知能ロボットに関する国際会議、マドリッドで。
実際のアプリケーション
これまでの Cheetah ロボットとは異なり、Cheetah 3 は人々の安全を守るように設計されています。
「この技術により、人間を派遣する代わりに、危険な状況に派遣できる機械を開発できるようになります」とキム氏は語った。
この機械は XNUMX ~ XNUMX 年以内に発電所や化学プラントを検査できるようになる予定です。
キム氏によると、XNUMX~XNUMX年後には下水道を航行できるようになるという。
15 年後には、燃えている建物から誰かを救える可能性があります。
Cheetah 3 はすでに、温度や化合物を測定したり、重いドアを開けたり、バルブを開閉したりすることができます。
「四肢の柔軟性を利用することで、チーター 3 は片足でドアを開けることができます」とキム氏は記事で述べた。 ステートメント。 「XNUMX 本の足で立ち、XNUMX 番目の手足にカスタマイズされた交換可能な手を装備して、ドアを開いたり、バルブを閉じたりすることができます。」
キム氏は、20年後には、同様のダイナミックな脚付きロボットが自宅で高齢者を支援できるようになるだろうと信じている。
同氏は声明で「障害者や高齢者がベッドから車椅子、車にスムーズに移動し、また戻るのを支援できる技術はまだない」と述べた。
「多くの高齢者は、ベッドから起き上がったり、階段を上ったりするのが困難です。 たとえば、膝関節に問題を抱えている高齢者の中には、平地ではまだかなり動けるが、補助なしでは階段を降りることができない人もいます。 彼らが助けを必要とするのは、一日のうちのほんの一部です。 そのため、軽量で短時間のサポートに使いやすいものを探しています。」
次は何ですか?
研究者らは、ロボットが永久に「盲目」であることを意図しているわけではない。 実際、彼らはすでに周囲の様子を視覚的に把握できるようにいくつかのカメラを追加しており、大きな障害物をより認識できるようにしています。
しかし今のところ、チームはチーターのブラインドモーションを改善することに焦点を当てています。
キム氏は声明で、「我々は視覚を持たない非常に優れたコントローラーを最初に望んでいる」と述べた。 「そして、視覚を追加する場合、たとえそれが間違った情報を与える可能性があるとしても、脚は(障害物を)処理できる必要があります。 カメラに映らないものを踏んでしまったらどうなるでしょうか? それは何をするのでしょうか? そこでブラインドロコモーションが役立ちます。 私たちは自分たちのビジョンをあまり信頼したくないのです。」

